|
CCTV Cameras
used on
Perimeters.
1.
Example for
placing cameras
on a Perimeter:
a)
General:
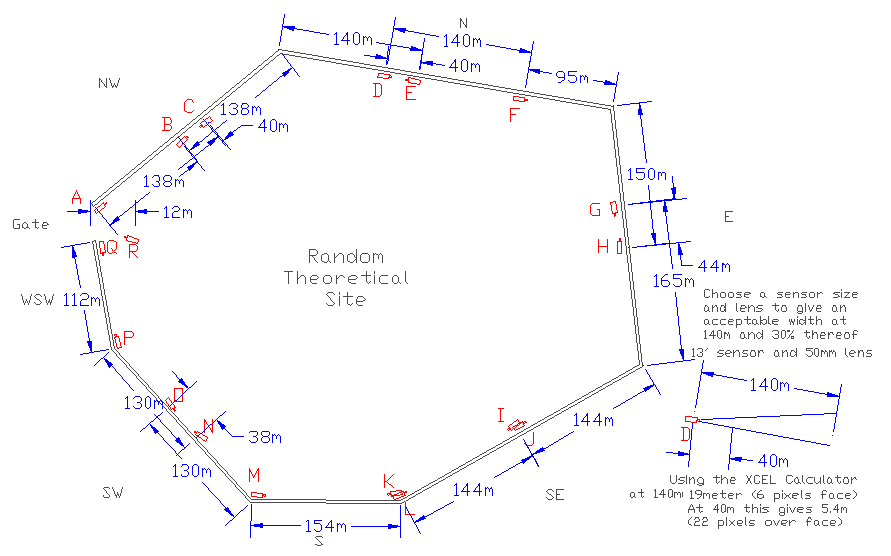
Herewith a
hypothetical
Site. Please
read the
addendum and
open the lens
calculator (an
Excel program)
to understand
why some of the
choices are
made:
Normally the
image from a
camera is usable
from 30% to 100%
of the design
distance.
Further away the
detail in the
image gets too
small to be
useful and
nearer than 30%
too small an
area is in
view. This must
be taken into
account when
covering an area
or perimeter.
Therefore camera
views must
overlap with one
camera covering
the next
camera. E.g. If
the design is
for the cameras
to each survey a
100m stretch of
the perimeter,
each camera’s
effective range
is the 100
meters from 40
meters to 140
meters (30% to
100%) away from
the camera. The
required details
must therefore
be detectable at
140 meters
distance and at
40 meters
distance the
full required
surveillance
area must be
covered.
For a viewer
(security
officer) to be
able to estimate
the position of
an occurrence,
the distance to
between the
occurrence and a
cameras must be
clear. Cameras
must be mounted
on poles more
than 3 meters
high (this also
makes them less
accessible to
possible
intruders). It
helps to install
clearly marked
signs within
camera view
(e.g. “C 50m”
which would
indicate that
the sign is 50
meters from
camera C)
Corners can
become a
problem. A
solution is for
a set of
cameras, 40
meters apart,
looking at one
another and then
on to the
corners. See
sketch above –
please contact
me if this
sounds obtuse –
Hendrik).
b)
Method:
Step 1:
Read the
“General
Information on
CCTV Cameras and
Systems”. The
addendum to this
document.
Step 2:
Obtain a scaled
layout of the
entire
perimeter. We
will use the
above sketch as
an example.
Assume the
perimeter
consists of two
fences spaced 4m
apart.
Step 3:
Select the
cameras
positions at
convenient
places, where
possible so that
each have a view
of about 140
meters. In an
area with dense
fog or rain the
distances can be
reduced to 50 or
even 30 meters
apart. Longer
ranges can also
be used.
Generally 100m
is a good
compromise
distance, which
means the camera
must cover the
area up to about
140 meters and
has proven
successful over
many years.
Remember to
allow for the
overlap i.e.
cameras must
overlap 30% of
the distance.
Note:
Typically the
cameras will be
installed on 4
meter poles just
inside the inner
fence. To
economise the
cables will be
strung on the
inner fence in
conduit. 25mm
conduit for the
co-axial cables
(1,5m above
ground level)
and 15mm conduit
for the power
cable (1m above
ground level).
The cameras will
be pointed so
that the bottom
of the image
shows the ground
at 30% of design
distance and the
outside border
of the image
shows the
outside fence at
30% of design
distance.
Step 4:
Choose a camera
type for each
position. Draw
them on the map
showing the
direction in
which each is
pointed. The
main decision is
the size of the
sensor – choose
economically
taking the
resolution and
sensitivity into
account. The
larger the
sensor the
better it will
work in low
light
conditions. Ask
advice – cameras
are now so
reliable that
the make is of
lesser
importance.
Note:
BLC (Automatic
back light
compensation) is
important. B&W
(Black and
White) cameras
is generally
better for night
vision and often
is very
sensitive in the
infra red
spectrum, which
can allow better
penetration of
fog and rain as
well as infrared
lighting at
night.
Step 5:
Choose a lens:
The decision of
which camera and
lens combination
to use for each
of the cameras
in the sketch
above is by
using the
lens calculator
available as an
Excel program.
The process is
as follows:
Camera A: View
distance 138m.
Perimeter width
to survey: 4m.
From the above
discussion we
know that at 30%
of the distance
we still want to
survey a 4 m
wide perimeter
area:
138X0.3=41.4
meters. Input
these values in
the
lens calculator
:
|
Sensor
size |
Sensor
Size:
Width X
Height
(mm) |
Distance
from
Camera
|
Required
View
Width |
Width at
30% of
distance |
Required
Lens
Focal
Length |
Standard
Lens
Focal
Length |
Actual
View
Width |
No of
Pixels
in face
width |
No of
Pixels
in face
height |
|
(inch) |
(Meters) |
(Meters) |
(Meters) |
mm |
mm |
(Meters) |
200mm |
250mm |
|
2/3" |
13.5 |
X |
10.2 |
41.4 |
4 |
1.7 |
140 |
100 |
5.6 |
22 |
27 |
|
1/2" |
10.2 |
X |
7.6 |
41.4 |
4 |
1.3 |
105 |
100 |
4.2 |
29 |
36 |
|
1/3" |
6.8 |
X |
5.1 |
41.4 |
4 |
1.7 |
70 |
50 |
5.6 |
22 |
27 |
|
1/4" |
5.1 |
X |
3.8 |
41.4 |
4 |
1.3 |
53 |
50 |
4.2 |
29 |
36 |
|
1/6" |
3.4 |
X |
2.5 |
41.4 |
4 |
1.7 |
35 |
25 |
5.6 |
22 |
27 |
|
1/8" |
2.5 |
X |
1.9 |
41.4 |
4 |
1.3 |
26 |
25 |
4.2 |
29 |
36 |
Supposing we
chose cameras
with 1/3”
sensors, which
are not very
expensive and
give a good
picture both in
low light
conditions as
well as in
sunlight. We
decided to use
an auto-iris
lens with a
large lens
opening (wide
aperture,
See wikipedia
for details)
to use outside
(i.e. to allow
good images in
low light
conditions as
well as in
strong light
conditions).
The calculator
shows that for
the 1/3” camera
a 50mm lens is
required.
Insert the
values in the
bottom part of
the
lens calculator
:
|
Choose a
sensor
size |
Sensor
Size: W
X H
(mm) |
Distance
from
Camera
|
Choose a
Lens
Size |
Actual
View
Width |
Width at
30% of
distance |
No of
Pixels
in face
width |
No of
Pixels
in face
height |
|
(inch) |
|
# |
|
(Meters) |
mm |
(Meters) |
(Meters) |
200mm |
250mm |
|
1/3" |
6.8 |
X |
5.1 |
138 |
50 |
18.7 |
5.6 |
7 |
8 |
Then look at the
lens sizes
again, there is
a great
difference
between the
required width
with the
standard lens
focal length
lenses as
calculated on
the
lens calculator
, so
choose another
lens size and
see whether
this is now
acceptable:
|
Choose a
sensor
size
(inch) |
Sensor
Size: W
X H
(mm) |
Distance
from
Camera
|
Choose a
Lens
Size |
Actual
View
Width |
Width at
30% of
distance |
No of
Pixels
in face
width |
No of
Pixels
in face
height |
|
(in
Decimal) |
|
# |
|
(Meters) |
mm |
(Meters) |
(Meters) |
200mm |
250mm |
|
1/3" |
6.8 |
X |
5.1 |
138 |
75 |
12.5 |
3.7 |
10 |
12 |
Using the 75mm
lens gives more
details at 138
meters. Even a
face start being
visible
(probably not
recognisable
yet). To survey
3.8 meters at
30% distance is
acceptable since
another camera
(C) is also
overlapping the
surveyed area.
You can now
calculate on the
lens calculator
that
camera C will
survey a width
of 8.7meters at
196.6 meters
(the 30%
distance from
camera A) if the
same camera/lens
combination is
used.
All Cameras are
selected in the
same way:
Cameras B and C
are the same as
Camera A: 1/3”
cameras 75mm
lens. Camera A
overlaps the
near view of
Camera B and the
3.8 meter survey
width is again
acceptable.
Cameras D and E
are the same as
Camera A: 1/3”
cameras 75mm
lens. View
distance 140m.
Perimeter width
to survey: 4m.
Camera F: 1/3”
camera 50mm
lens. View
distance 95m.
Perimeter width
to survey: 4m.
Cameras G, H, I,
J, K, L, M, N &
O: 1/3” cameras
75mm lens View
distances 150,
165,
144, 144, 144,
154, 130 &
130m. Perimeter
width to survey:
4m.
Cameras P & Q:
1/3” camera 50
mm lenses. View
distance 112m.
Perimeter width
to survey: 4m.
Actually a 75mm
lens would give
much better
detail. As they
are pointed at
one another, the
56m distance is
the narrowest
survey point and
here a full 5.6
m width is
covered. And
only 10 meters
width at the
other camera.
So choose a 75mm
lens.
Camera R: 1/3”
camera, 8mm
lens. View
distance 12m.
Perimeter width
to survey: 9m
(The gate area,
the gate is
assumed to be 7m
wide).
Step 6:
Finalise the
installation
requirement by
a)
listing
the cameras and
lenses in a
matrix,
b)
decide
where the
cameras will be
monitored from,
c)
Position
the nodes (see
below)
d)
Show the
cable runs and
type (see
below).
2.
Installation
Methods:
The installation
of cameras round
a perimeter (or
elsewhere),
where the
distances to be
surveyed are
long, requires
some decisions
on cost
effectiveness to
be made.
Installed cable
cost is often
greater than the
cost of
electronics.
The principle is
therefore to
reduce cable
lengths by
installing a
number of
“nodes” where
data is captured
and control
instructions (if
required) are
passed on.
The above
hypothetical
perimeter can be
used as an
example to
illustrate the
principle:
In the case of
CCTV the node
will typically
be a stand alone
DVR (Digital
Video recorder)
unit which can
record images
from up to 8
cameras. These
will typically
also allow
control of
camera functions
(if needed) and
VMD (Video
Motion
Detection). The
size of an
internal hard
disk (or other
recording
device) can be
selected for
size and the
storage
requirements of
images from each
camera can be
configured.
The node
communicates
with control
computers by
means of TCP/IP
(a communication
protocol also
used by the
internet) which
can be done by
wireless or
cable (often
fibre optic).
The security of
the
communication is
protected by
various means.
Power is
distributed from
the node where a
small UPS and
power supply is
installed in an
environment
protected
container
housing all.
The housing is
positioned near
a camera pole
central to up to
8 other cameras
– see below.
The video
connection
between the
camera and the
node is by means
of either
twisted pair or
co-axial cable
(RG59 up to
100meters and RG
6 up to 500
meters and RG11
up to 1000
meters); Power
is supplied by a
daisy chain
between the
cameras (12volt
or 24volt or
220volt
depending on the
cameras
selected).
Seeing that the
cost of the
cabling tends to
be the more
expensive than
nodes, the node
will typically
connect to
either 5 or 7
cameras i.e. not
use all 8
inputs.
In the example
the 18 cameras
require either 3
or 4 nodes (7 or
5 cameras per
node on
average). They
are positioned
in possible
configurations
and the cost
calculated for
the most
economical
solution.
As an
example:
|
Node
positioned
at
camera |
Connected
to
Camera |
Direct
distance |
Connection
to
pole
&
node |
Cable
distance |
Conduit
distances |
|
Q
(8-way
DVR) |
A |
10 |
6 |
16 |
10 |
|
|
B |
108 |
6 |
114 |
98 |
|
|
C |
148 |
6 |
154 |
40 |
|
|
Q |
0 |
5 |
5 |
5 |
|
|
R |
12 |
6 |
18 |
132 |
|
|
P |
112 |
6 |
118 |
12 |
|
|
O |
204 |
6 |
210 |
92 |
|
|
N |
242 |
6 |
248 |
38 |
|
F |
D |
140 |
6 |
146 |
40 |
|
|
E |
100 |
6 |
106 |
100 |
|
|
F |
0 |
5 |
5 |
5 |
|
|
G |
201 |
6 |
207 |
201 |
|
|
H |
245 |
6 |
251 |
44 |
|
K |
M |
154 |
6 |
160 |
154 |
|
|
L |
0 |
5 |
5 |
5 |
|
|
K |
0 |
6 |
6 |
5 |
|
|
I |
144 |
6 |
150 |
144 |
|
|
J |
144 |
6 |
150 |
5 |
|
|
|
Total
distances
in
meters |
2069 |
1130 |
It would seem
that a first
configuration
immediately
yields an
excellent
solution. The
cable and
conduit
installed cost
can now be
calculated and
compared to node
costs to obtain
good budgetary
figures for the
system cost.
3.
Lighting:
Lighting is
discussed in a
separate
document.
4.
Operation:
The system
configuration
can be done from
central
computers. Many
vendors will be
able to supply
the above type
of system.
Although each
vendor might use
a different
set-up procedure
the following
result is easily
obtainable:
Although all
cameras are
electronically
monitored
continuously,
when no alarm is
triggered, less
than one image
per second is
more than
adequate for
future
evaluation. On
alarm (whether
false or
nuisance and
whether
triggered by VMD
or external
alarm trigger),
images of the
cameras viewing
the alarm area
must record at
up to 25
frames/second (5
frames per
second are the
minimum to be
adequate). Good
systems will be
able to do
pre-alarm
recording. The
duration of
higher speed
recording and
the speed are
dictated by the
size of the hard
disk and the
duration that
records must be
kept. These
records are
recorded at the
node. Only some
of the images
are transferred
to the
monitoring
computer. Only
during
evaluation are
more images or
streams of video
downloaded from
the nodes.
The bandwidth to
obtain all
required
information,
even on a
worldwide bases,
can be
controlled and
limited by
judicious
decisions of
which images and
video streams to
download to
monitoring
control rooms.
Addendum:
General
Information on
CCTV Cameras and
Lenses
CCTV cameras are
produced to
conform to one
of several
standards. The
most important
are PAL (South
Africa, Europe,
Asia, Australia,
etc.) and SECAM
(France, Russia,
parts of Africa
etc.) both of
which standards
specify 25
frame/second,
while NTSC (USA,
Canada, Japan,
etc.) specifies
29.97
frame/second.
These standards
are not
interchangeable
but most
equipment, not
cameras, can
usually
accommodate at
least NTSC and
PAL.
Make sure the
CCTV cameras and
all equipment
used for ESKOM
are PAL
compatible.
Video can be
interlaced or
progressive.
Interlacing was
invented as a
way to achieve
good visual
quality. The
horizontal scan
lines of
each interlaced
frame are
partitioned into
two fields.
NTSC, PAL and
SECAM are
interlaced
formats.
Interlacing
means that a
frame actually
consists of two
fields (slightly
offset
vertically)
taken 1/50th of
a second apart.
If there is
movement in this
period, the
frame (picture)
looks as if the
picture is out
of focus
wherever
movement
occurred (parts
of a stationary
picture appear
to be moving or
flashing).
Therefore
recording is
sometimes done
with single
fields, doubled
and offset to
simulate a full
frame.
Resolution of
the standard
640X480 pixels
then is
effectively
reduced to
640X240 pixels.
In digital
imaging, a
pixel (picture
element)
is the smallest
piece of
information in
an image.
Video resolution
specifications
often include an
i to
indicate
interlacing. For
example, PAL
video format is
often specified
as 576i50,
where 576
indicates the
line resolution,
i
indicates
interlacing, and
50
indicate 50
fields
(half-frames or
fields) per
second. The
difference
between the 640
pixel per line
standard and 576
is due to
information
using up some of
the
resolution.
In
progressive scan
systems, each
refresh period
updates all of
the scan lines.
The result is a
higher perceived
resolution – the
problem
explained above
is overcome. The
size of a video
image is
measured in
pixels for
digital video,
or horizontal
scan lines and
vertical lines
of resolution
for analogue
video.
The cameras
capture images
by means of an
image sensor
which is
typically either
a charge-coupled
device (CCD) or
a complementary
metal–oxide–semiconductor
(CMOS)
active-pixel
sensor. These
are now
typically made
in a number of
sizes by a
number of
manufacturers
(Sony, Sharp,
Panasonic,
Philips, etc).
The size of the
sensor is
measured in
inches over the
diagonal.
Before 1990
sensors were
vacuum tubes
of typically
1” and 1/2” size
with the larger
allowing the
higher
resolution and
better quality.
The typical
sizes of CCD or
CMOS sensors
currently are
2/3”,½”, 1/3”,
¼” and 1/6”.
Technology has
allowed
miniaturisation
to the extent
that full
resolution can
be available in
all these sizes
but each size
require a
different lens,
even if using a
standard C-mount
attachment
(lenses are
often specified
as C or
CS-mount.
The 2 standard
cctv camera lens
mounts. The
difference
between the two
is simply the
distance between
the lens and the
image sensor. C
Mount - 17.5mm;
CS Mount -
12.5mm).
The 1/6” sensor
can be of higher
quality than the
larger sizes
since there is
less likelihood
of dead areas on
the chip, the
smaller the
chip. One
quality measure
is the number of
dead pixels and
sizes of dead
pixel clusters
on a chip – the
quality
improvement of
chip manufacture
has made this
less
important.
However the
larger the chip
the more light
it can capture.
With PAL a full
resolution image
sensor is
640X480 (640X240
per field).
Note: not all
usable due to
information
being
superimposed on
the ends of
lines and
images. This
means that the
image can not be
“blown up” to
see more details
(as done in TV
series) and if a
face must be
recognisable,
the total image
in view can not
be more than the
width of a
double garage (6
meters wide,
i.e. 4.5 meters
high). In this
case the face
would have a
resolution of
about 20 pixels
in width – not
much.
The lens size
must be chosen
to view a
specific width
and height at a
specific
distance. The
selection of
lens size is
dependent on the
sensor size.
The size is
measured on the
diagonal and is
actually a 4:3
rectangle and
the actual
dimensions can
therefore be
calculated as in
the
accompanying
spreadsheet (the
actual picture
is about 5%
smaller since
the information
transmission/signalling
method cuts of
the edges):
|
Calculation
of CCTV
Camera
views |
|
640 |
W X |
480 |
Pixels |
|
You may
only
insert
values
in the
highlighted
yellow
Cells. . |
|
|
|
|
|
Sensor
size |
Sensor
Size:
Width X
Height
(mm) |
Distance
from
Camera
|
Required
View
Width |
Width at
30% of
distance |
Required
Lens
Size |
Standard
Lens
Size |
Actual
View
Width |
No of
Pixels
in face
width |
No of
Pixels
in face
height |
|
(inch) |
(Meters) |
(Meters) |
(Meters) |
mm |
mm |
(Meters) |
200mm |
250mm |
|
1" |
20.3 |
X |
15.2 |
100 |
6 |
2.0 |
339 |
300 |
6.8 |
18 |
22 |
|
1/2" |
10.2 |
X |
7.6 |
100 |
6 |
2.0 |
169 |
150 |
6.8 |
18 |
22 |
|
1/3" |
6.8 |
X |
5.1 |
100 |
6 |
2.0 |
113 |
100 |
6.8 |
18 |
22 |
|
1/4" |
5.1 |
X |
3.8 |
100 |
6 |
2.0 |
85 |
75 |
6.8 |
18 |
22 |
|
1/6" |
3.4 |
X |
2.5 |
100 |
6 |
2.0 |
56 |
50 |
6.8 |
18 |
22 |
|
1/8" |
2.5 |
X |
1.9 |
100 |
6 |
3.0 |
42 |
25 |
10.2 |
12 |
15 |
|
|
|
|
|
100 |
6 |
|
0 |
Fish Eye |
|
|
|
|
The
camera
image
will be
useful
from 30%
of the
required
distance. |
|
|
|
|
Choose a
sensor
size |
Sensor
Size: W
X H
(mm) |
Distance
from
Camera
|
Choose a
Lens
Size |
|
Actual
View
Width |
Width at
30% of
distance |
|
No of
Pixels
in face
width |
No of
Pixels
in face
height |
|
(inch) |
|
# |
|
(Meters) |
mm |
|
(Meters) |
(Meters) |
|
200mm |
250mm |
|
1/3" |
6.8 |
X |
5.1 |
100 |
25 |
|
27.1 |
8.1 |
|
4 |
6 |
The extent of
the image, which
will be recorded
and can be seen
on the screen ,
depends on the
camera sensor
and lens
combination
used. Note:
Using a lens of
the same focal
length with a
smaller sensors
gives more of a
telephoto effect
but captures
less light. A
larger lens
aperture
captures more
light and can be
used to overcome
smaller
sensors.
The sensors
inside cameras
(here given as
640X480) are the
typical sizes
available on the
market. One
must know the
sensor size and
the resolution
of any camera
used. The
resolution can
be lower than
the typical
640X840 pixels
on cheaper
cameras or more
for High
Definition TV.
In the
calculator the
calculation can
be adapted by
inserting other
values in the
place of the 640
and 480 values.
The more pixels
the more details
can be seen.
Less than 15 to
20 pixels across
a face are
regarded as
unrecognisable.
I.e. as the
picture is
enlarged the
pixels become
visible as
squares (larger
and larger) and
things become
even more
difficult to
recognise.
|

{kind=link}
{kind=link}
{kind=link}
{kind=link}